CHINESE ACADEMY OF SCIENCES

-

- Magnetic intravascular ultrasound robot
- (NO.213 July 2024)
- Issue NO:Research Progress Updated:31-07-2024

Schematic diagram of the magnetic IVUS robot [IMAGE: SIBET]
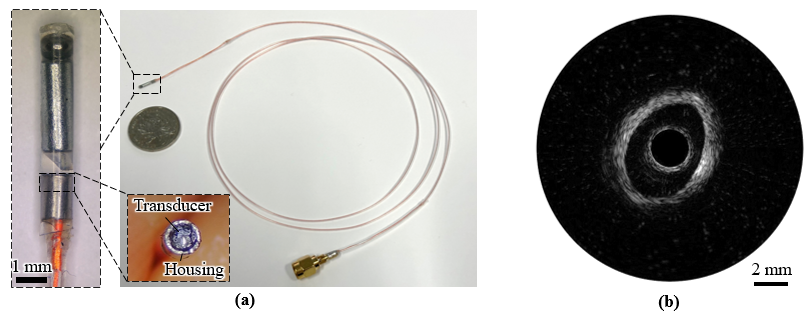
Prototype IVUS robot and its imaging result [IMAGE: SIBET]
A research group from the Suzhou Institute of Biomedical Engineering and Technology (SIBET) of the Chinese Academy of Sciences (CAS) has developed a dual-mode magnetic intravascular ultrasound (IVUS) robot with both small size and high flexibility.
IVUS utilizes guidewire technology to deliver a miniature ultrasound probe into blood vessels, which can provide cross-sectional vascular ultrasound images. Its clinical value has been recognized worldwide.
However, the miniature single-element ultrasound probe of a traditional IVUS is driven by an outside-placed motor through a long flexible shaft, and faces challenges while imaging in complex vascular regions, such as inflexible manipulation and non-uniform rotation distortion (NURD).
Therefore, exploring a novel IVUS catheter with flexible manipulation and stable imaging in complex vascular areas is necessary for accurate diagnosis and treatment of cardiovascular and cerebrovascular diseases.
The dual-mode magnetic IVUS robot developed by the SIBET team consists of a front tip and a back catheter. The design eliminates the long flexible shaft structure, and brings the robot small size and high manipulation flexibility.
In navigation mode, the robot performed controlled bending under the actuation of static magnetic fields, actively entering the target branch at the bifurcated blood vessel. In imaging mode, it completed stable acoustic beam scanning under the actuation of dynamic magnetic fields, providing high-resolution ultrasound images.
“The dual-mode magnetic IVUS robot improves both operational flexibility and imaging stability during the intervention procedure, providing a potential solution for the visualization of complex vascular structures,” said Cui Yaoyao, leading researcher of the study, from CAS’s SIBET.
The results of the above study entitled “Development and Control of a Dual-Mode Magnetic Intravascular Ultrasound Robot for Imaging in Tortuous Blood Vessels” were published in the recent issue of IEEE/ASME Transactions on Mechatronics.
For more information, please contact:
Xiao Xintong
E-mail: xiaoxt@sibet.ac.cn
Suzhou Institute of Biomedical Engineering and Technology,
Chinese Academy of Sciences
Source: Suzhou Institute of Biomedical Engineering and Technology,
Chinese Academy of Sciences